Paper Review. OneShot Global Localization_Instant LiDAR-Visual Pose Estimation”@ICRA’ 2020
Introduction
Related Work
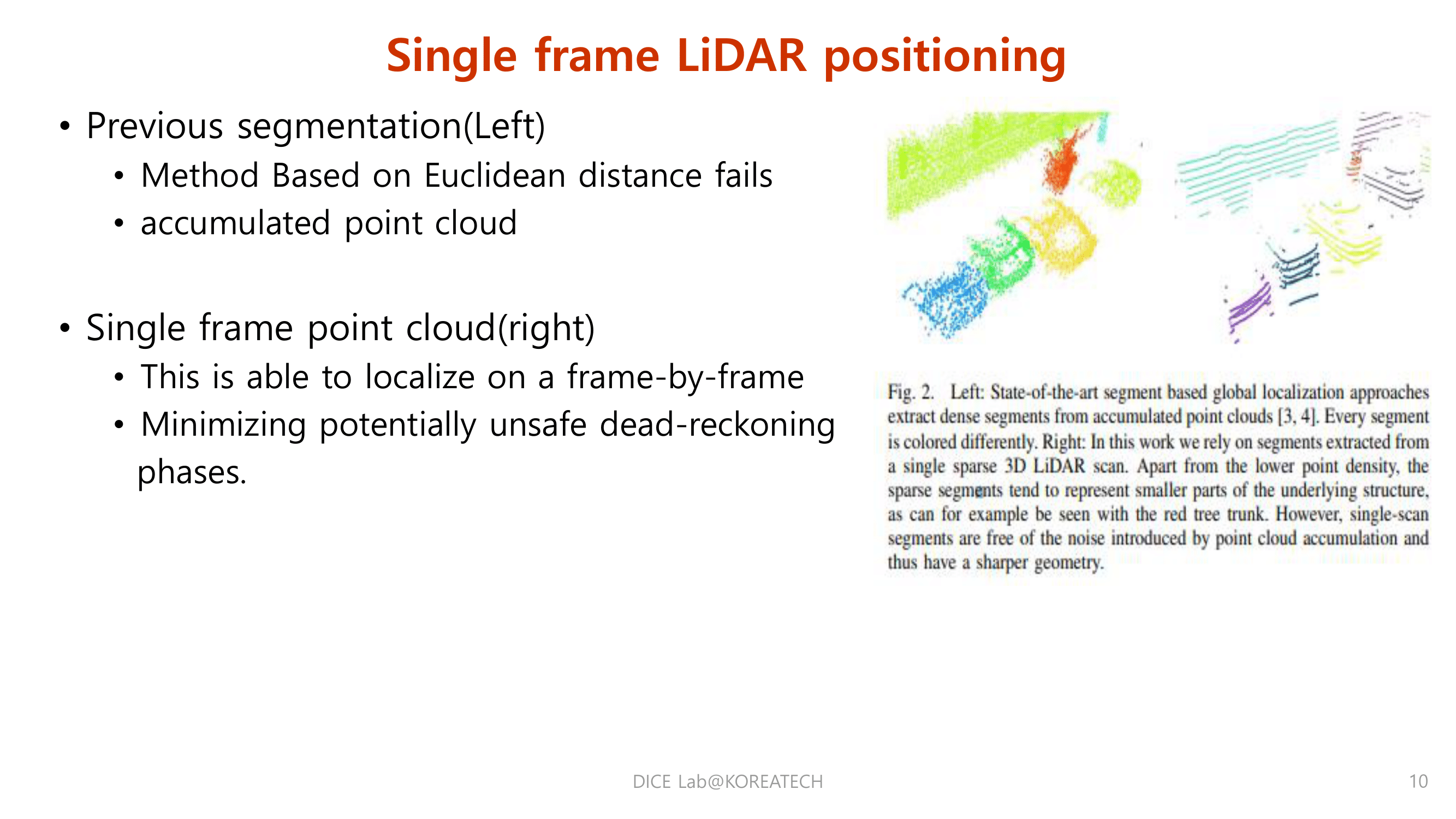
LiDAR Localization
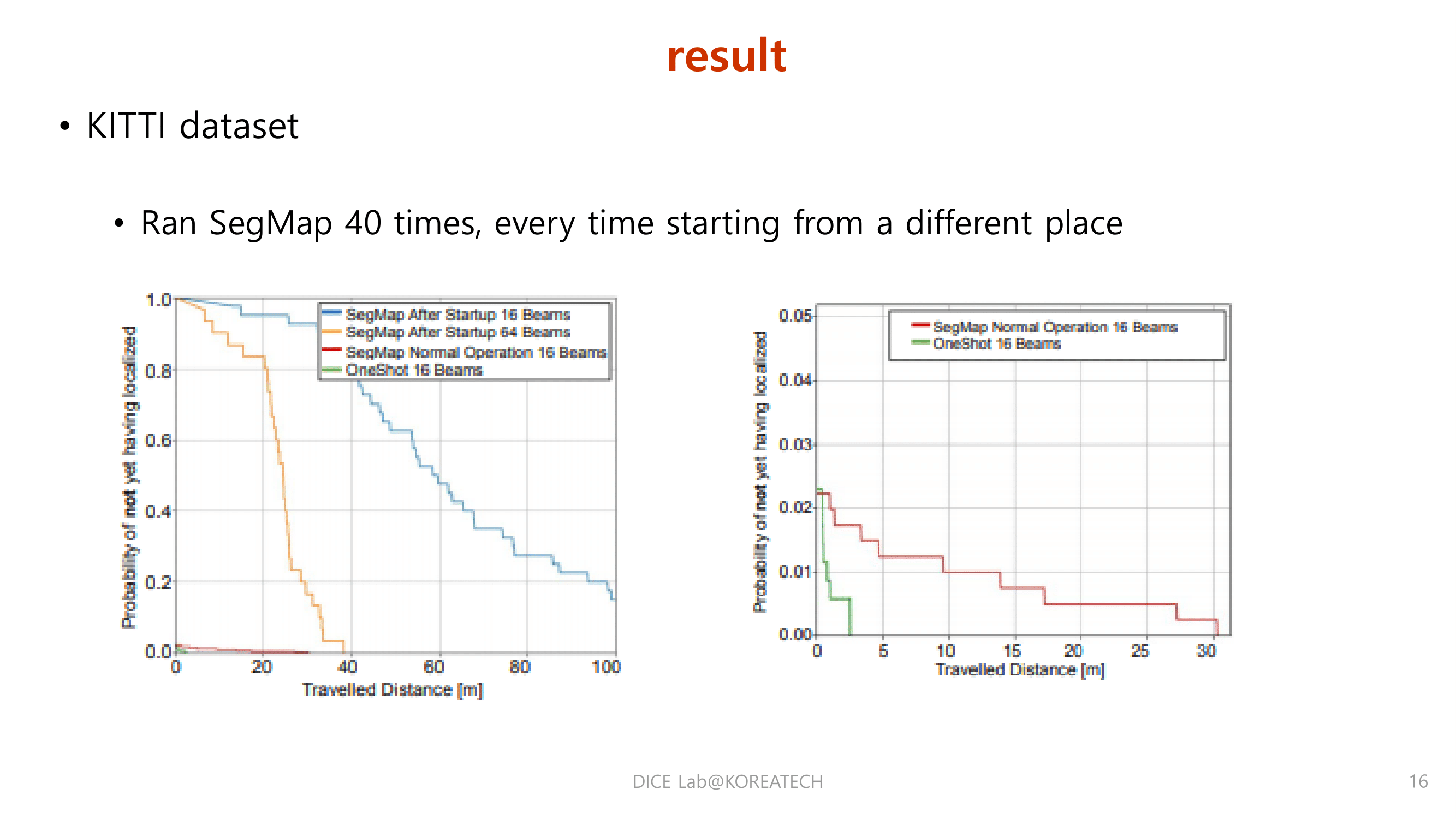
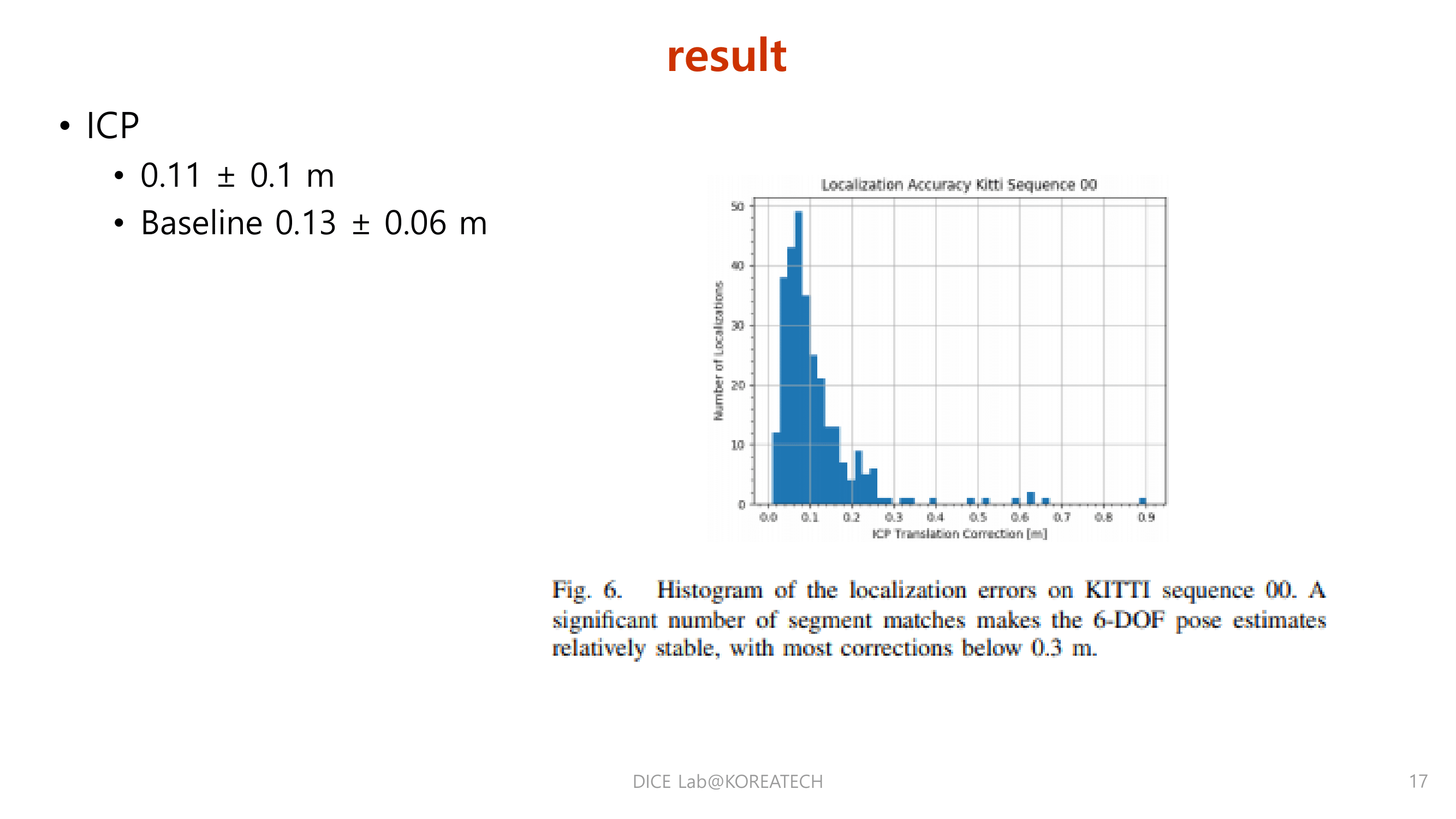
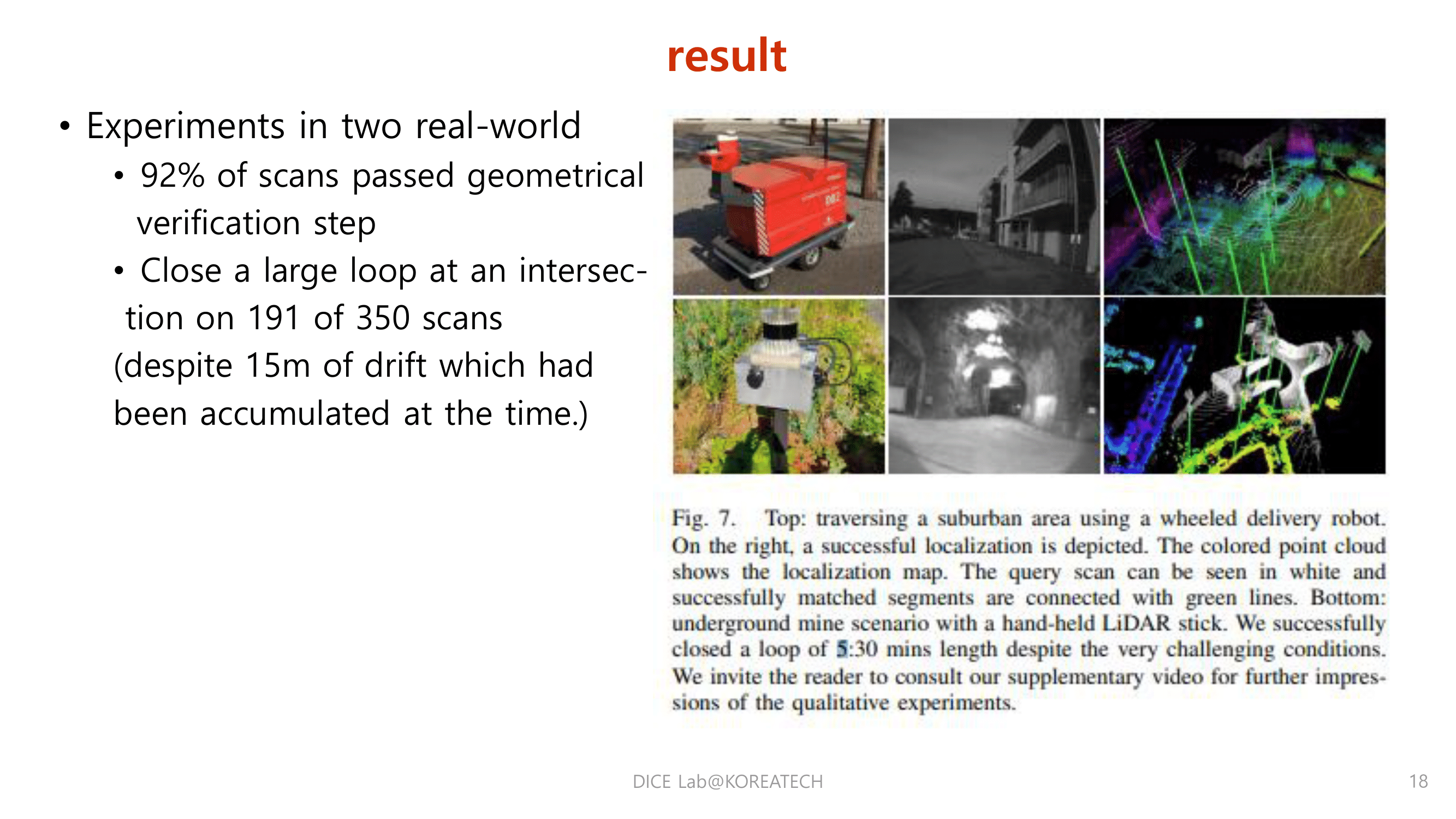
Experiments
Conclusions & Reviews
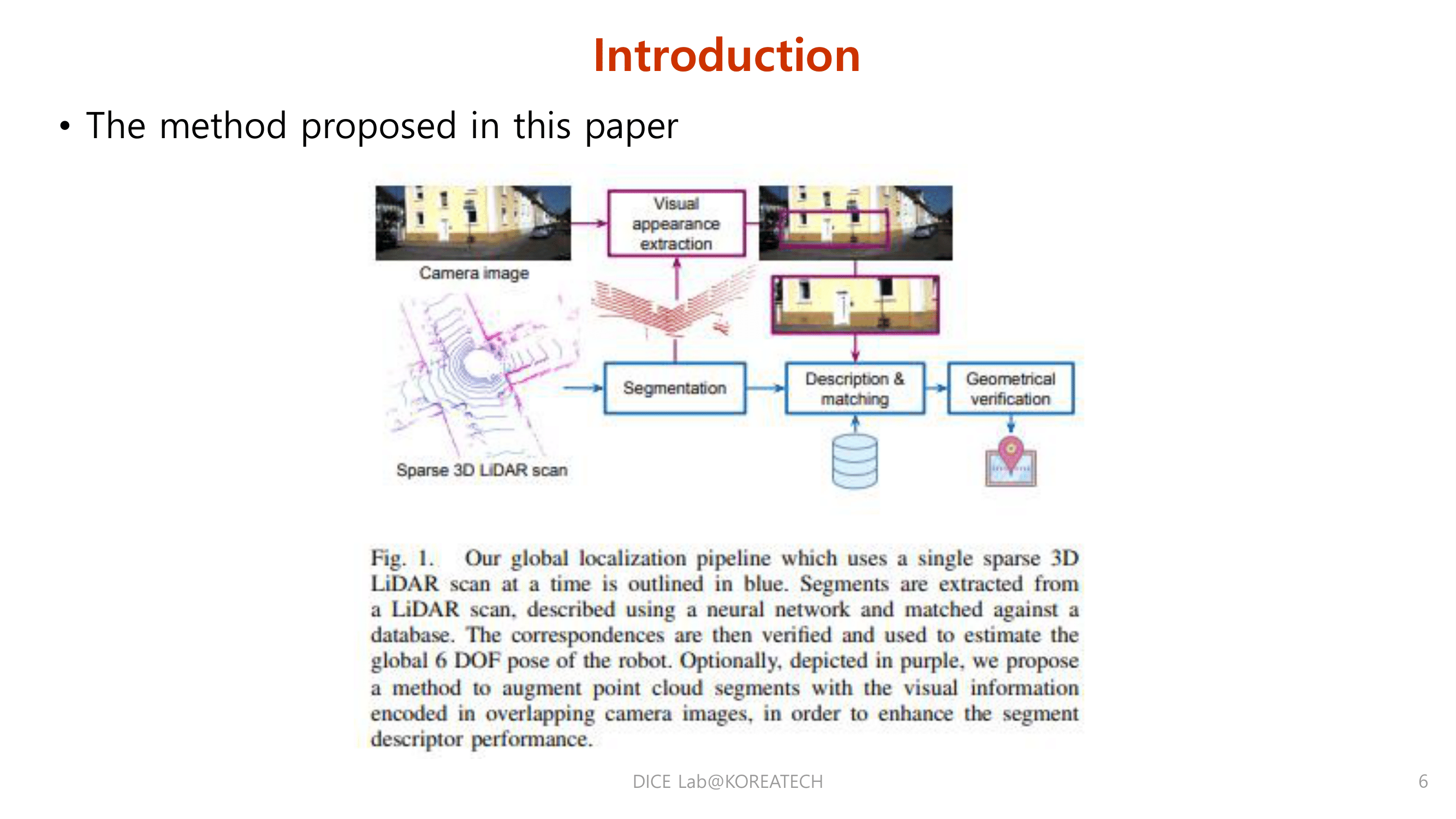
This paper presented OneShot, a global localization algorithm based on sparse 3D point cloud segmentation.
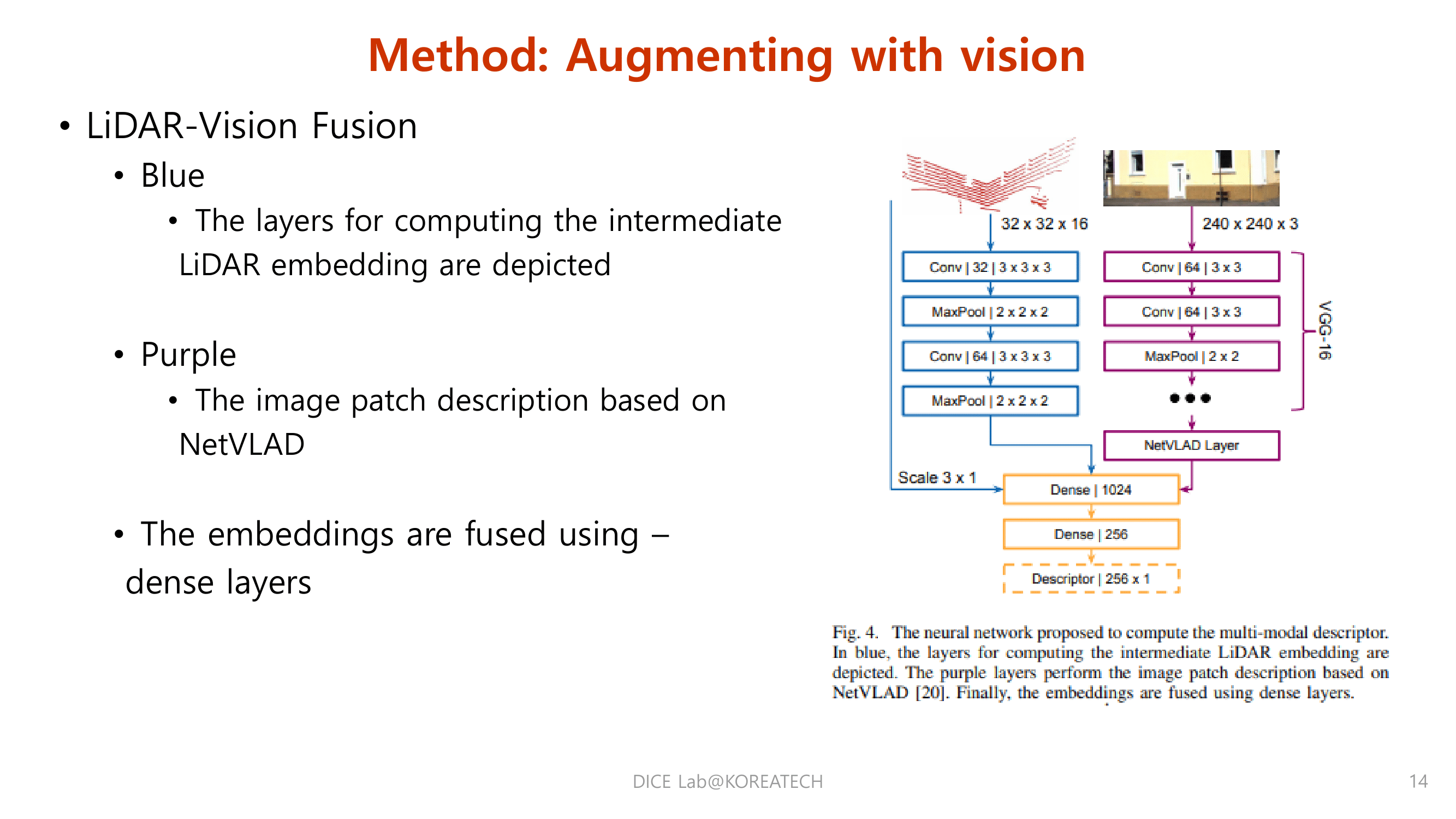
Increase the performance of the segment descriptor by fusing the visual information.
Increased descriptor retrieval rates by 17% to 26% when compared to using only LiDAR.
Reference
This post is licensed under CC BY 4.0 by the author.